应用化学 ›› 2022, Vol. 39 ›› Issue (1): 188-195.DOI: 10.19894/j.issn.1000-0518.210285
张晋红1,2, 石奎1, 徐鹏1, 李倩1, 薛龙建1( )
)
ZHANG Jin-Hong1,2,SHI Kui1,XU Peng1,LI Qian1,XUE Long-Jian1()
摘要:
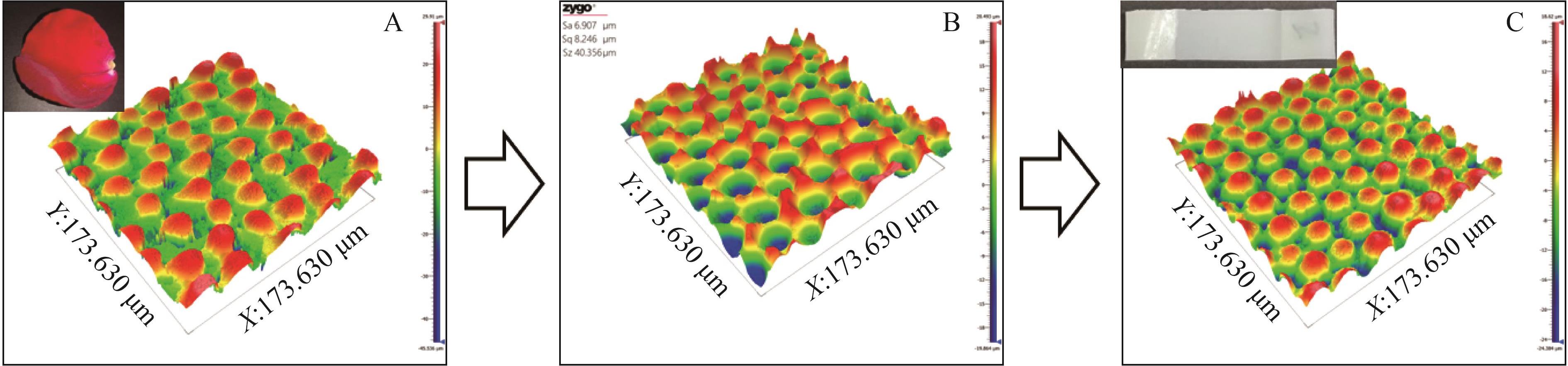
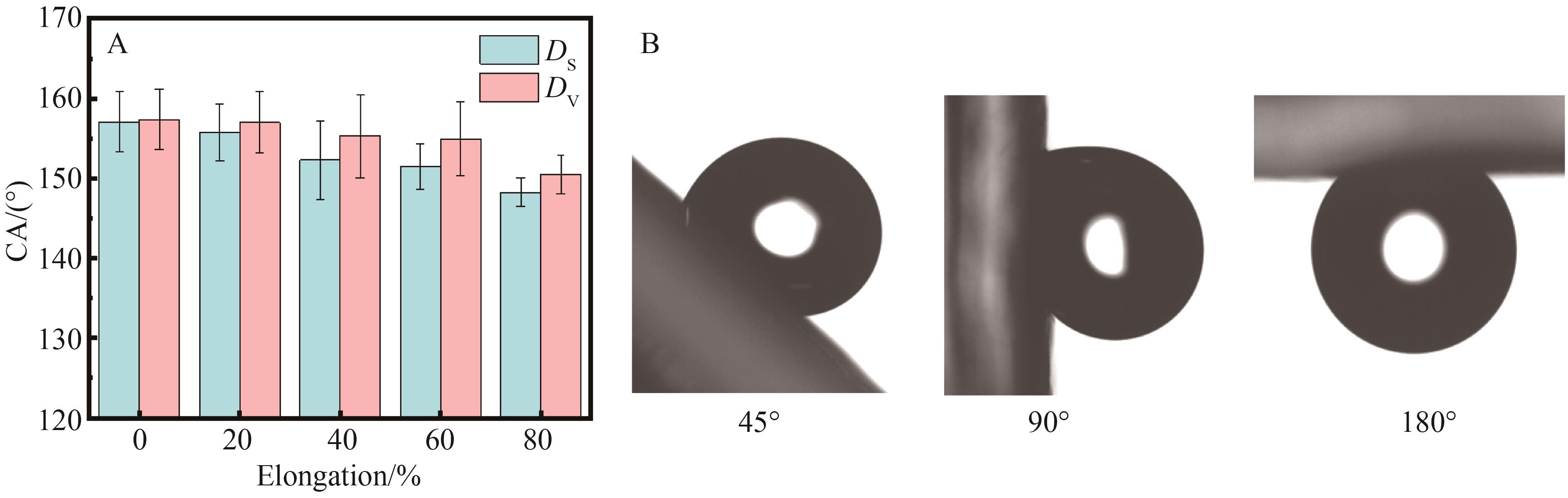
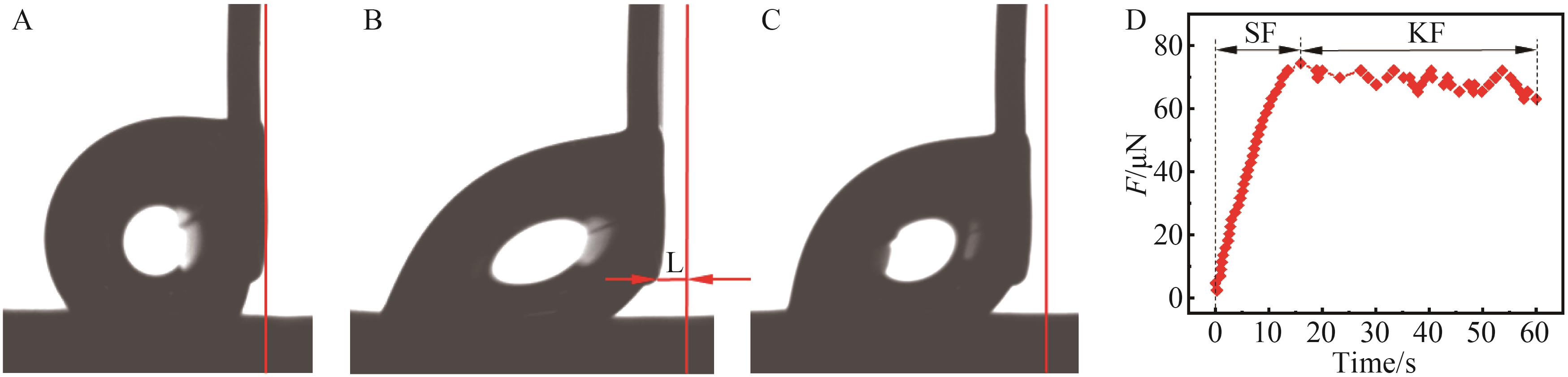
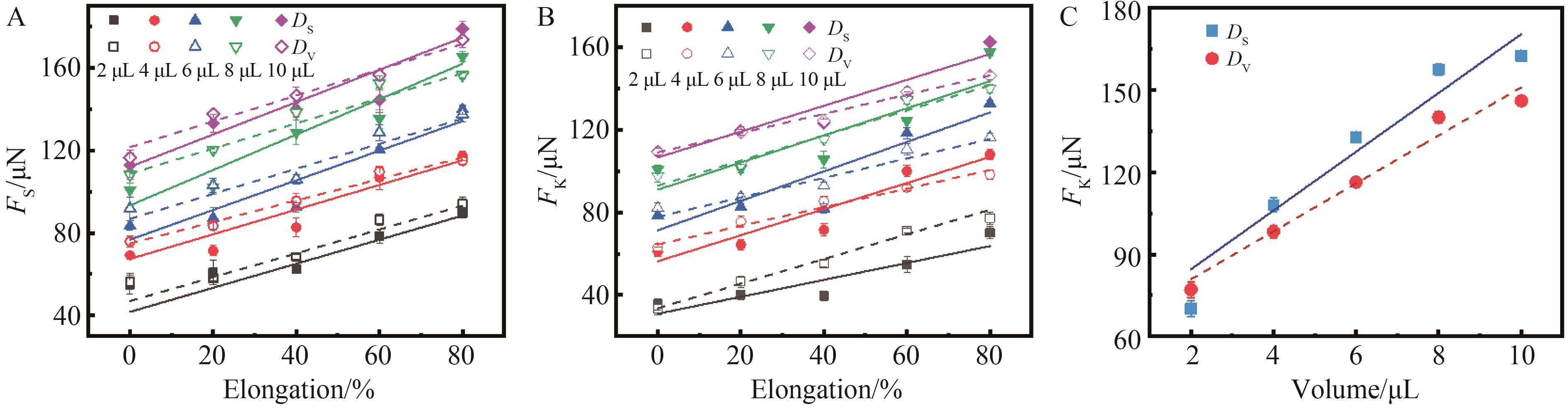
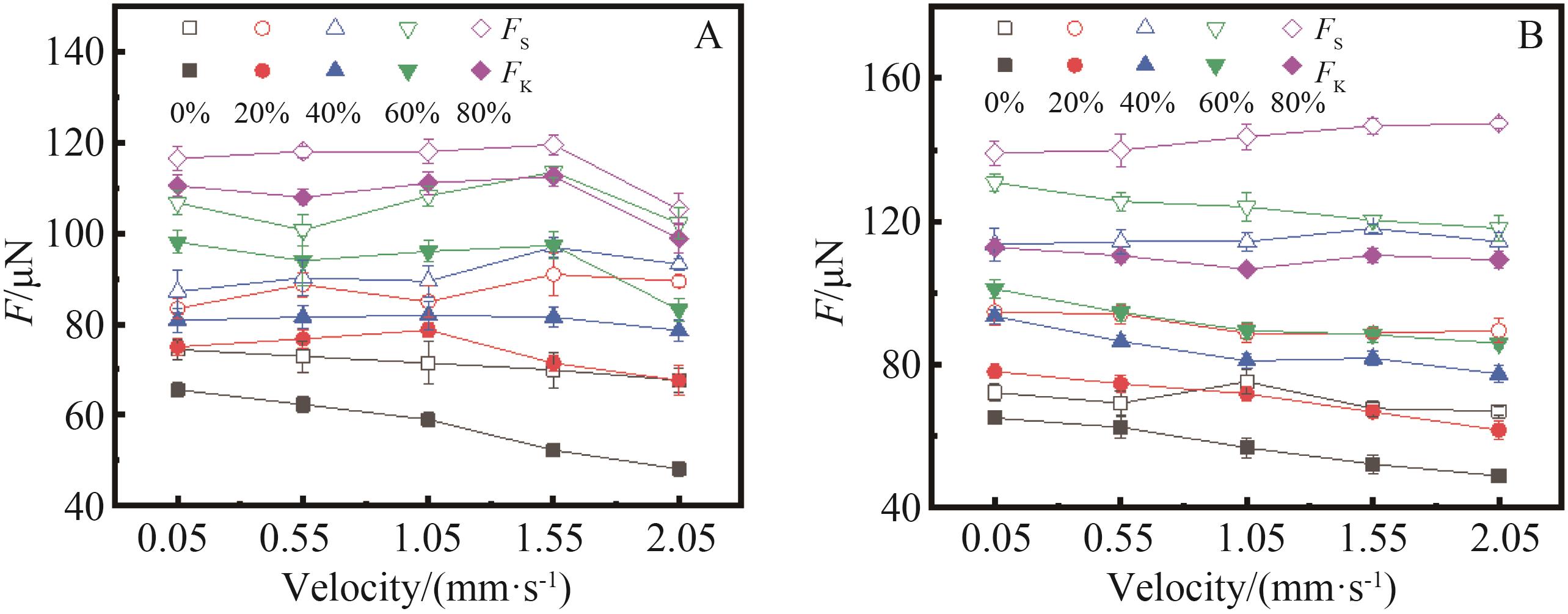
仿生超疏水材料在自清洁、防雾抗冰、油水分离、集水等领域有着重要应用;而在不同疏水状态之间的转换将大大促进仿生超疏水材料在智能技术领域的应用。利用软印刷技术将玫瑰花表面微观结构转印到聚氨酯弹性体PU膜表面,利用机械应力实现表面微结构的动态实时调控,实现了表面微观结构在各向同性与各向异性之间的可逆转换;利用毛细管投影传感技术(MPCP)定量表征了水滴在仿生PU膜表面的摩擦力,详细讨论了PU膜在不同拉伸状态下拉伸量、拉伸方向以及液滴体积和移动速度对液固界面摩擦力的影响。结果表明,仿玫瑰花PU膜的静态接触角和滚动角均非常接近新鲜玫瑰花,保留了玫瑰花的超疏水、高黏附和各向同性的性质。样品拉伸后,表面微结构沿着拉伸方向(DS)和垂直方向(DV)表现为各向异性,但接触角和滚动角在两个方向无明显区别。但液滴在DS和DV方向的摩擦力大小不同,且对水滴体积具有不同的依赖性,呈现明显的各向异性。随着样品延伸率的增大,水滴在PU膜表面的静摩擦力(FS)和动摩擦力(FK)明显增大,而增强的幅度同样对方向具有一定的依赖性。沿着DS方向,只有当液滴的移动速度高于1.55 mm/s时,摩擦阻力随着移动速度的增加而减小;而在DV方向,摩擦阻力随着移动速度的增加而减小。本文利用机械应力实现了高黏附超疏水表面液固界面摩擦力在各向同性和各向异性两个状态之间的转变以及液固界面摩擦的调控,为智能润湿性表面的设计、表征和应用提供了新思路。
中图分类号: