仿生干湿摩擦黏附器件的研究进展
Recent Progress of Biomimetic Dry/Wet Friction Adhesion Devices
仿生干湿摩擦黏附器件的研究进展 |
| 张云雷, 赵蔚祎, 麻拴红, 周峰 |
|
Recent Progress of Biomimetic Dry/Wet Friction Adhesion Devices |
| Yun-Lei ZHANG, Wei-Yi ZHAO, Shuan-Hong MA, Feng ZHOU |
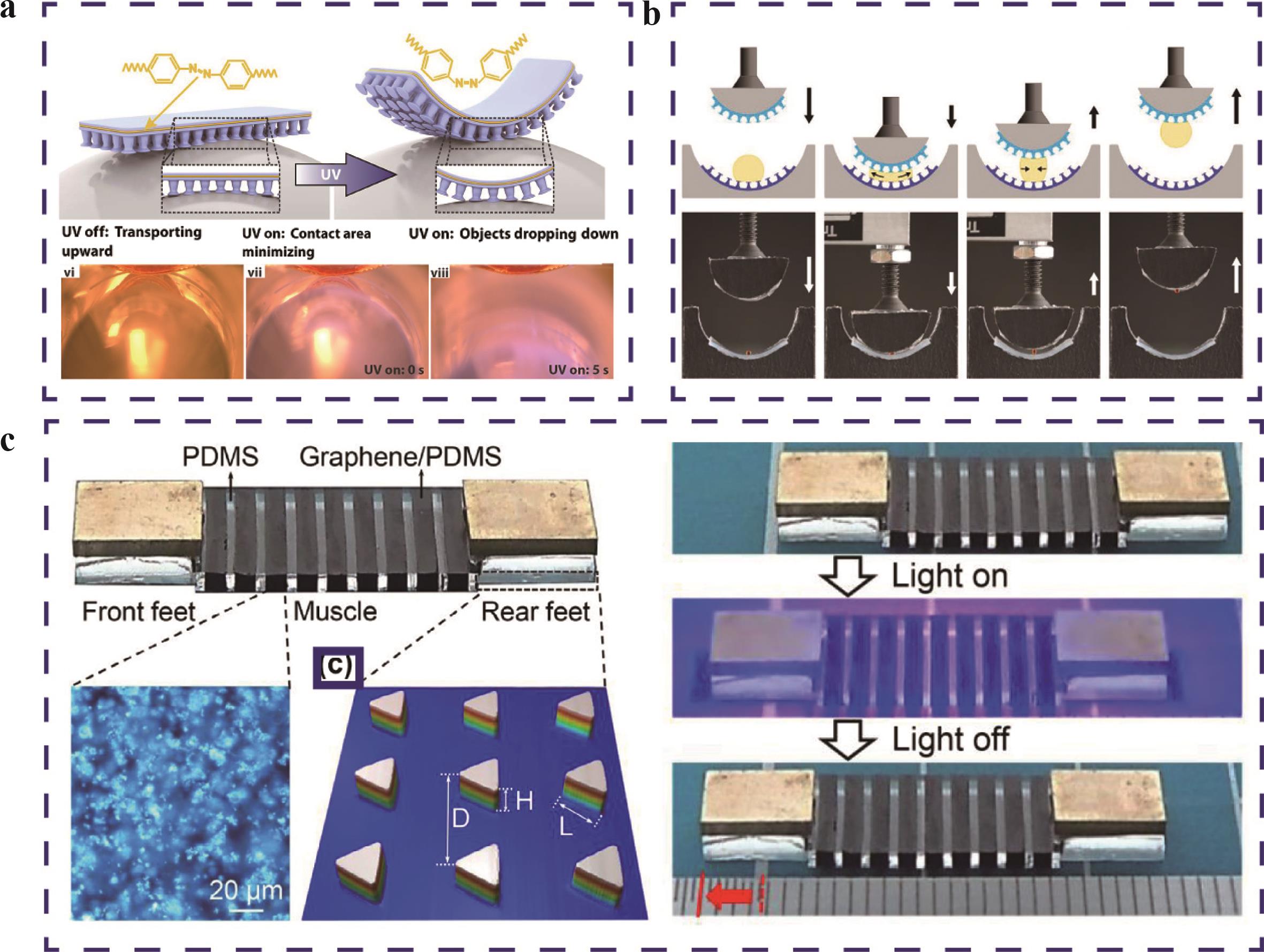
| 图5 (a)壁虎脚表面微结构耦合本体形变诱导可逆抓取的黏附器件[ |
| Fig.5 (a) A reversible adhesion device realized by the combining effect of surface microstructure and mechanical deformation[ |
|
|